Delivery Challenge
The delivery robot has to bring packages from one location to another. Introduction To help people in need in the current pandemic, you and your colleagues have decided to build an autonomous delivery robot.
Your robot will pick up food and other supplies and deliver them to residences with minimal contact, all to help fight the spread of the coronavirus.
Of course, a full-sized version will have to wait until you get millions of dollars in investments for your robotics company, but that doesn’t mean you can’t have fun dreaming with a scale model here.
Your robot will have an arm for lifting and carrying “bags” of goods and sensors to help it navigate a simple network of “streets.” Complicating things a little, not everything to be delivered is always put in the right spot for easy collection and sometimes road construction might block your path. But you’ll still need to make it work!
The world is counting on you! Can you make it happen?
Objectives
The final project is a chance for you and your teammates to demonstrate that you can apply concepts and strategies from the course to a specific challenge. You will apply theoretical knowledge to the design of your system and use focused testing to improve the performance. The project will culminate in a demonstration where you will prove your robot’s performance. To help us understand more about your system and your process, you will also produce a report describing the system development and an assessment of how well it met your goals.
The successful team will design, build, and demonstrate a robot that can accomplish a prescribed set of tasks. To be successful, you will need to:
Identify key performance criteria and develop a strategy for meeting your team’s objectives, Identify key factors that affect performance and use analysis and testing to specify them, Develop and apply a testing strategy to ensure performance, Evaluate the system performance, and Describe the system and your design process.
Challenge
Your challenge is to program your robot to pick up bags of supplies from known and unknown locations and deliver them to specified delivery points. The challenge is constructed such that the tasks have a range of difficulty. For example, located the free range bag and scoring them will earn more points, as will being able to navigate around the construction sign. Since you will have to perform multiple runs, reliability will be essential.
Course
The course will consist of a strip of tape (to simulate roads) with a designated place to pick up bags and three specified drop zones. Most bags will be placed at the end of the main road, though some will be placed in a “free range” zone. Figure 1 shows a typical arena, though we realize that there will be some variation in each course.
Bags
You will be expected to build your own delivery bags, for example from paper or card stock and paper clips. You should have at least two bags ready for the demo. You may “recycle” them as the demo progresses. [Insert approximate dimensions of bag that the XRP can pick up]
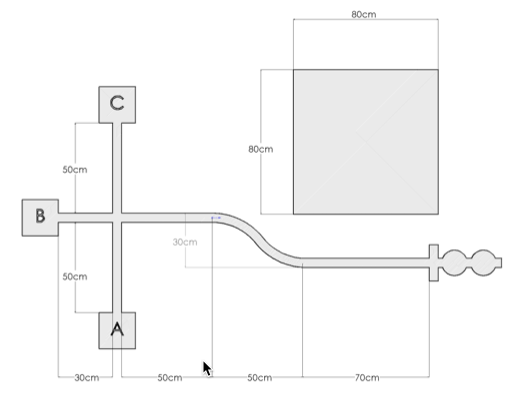
Figure 1: Diagram of the arena. Individual arenas will vary.
Collection
Most of the bags will be placed on the line at the end of the main road. You may place a piece of tape near the pickup zone to indicate where it starts, but the bags will be placed at different distances from the tape.
To earn points for collecting the free-range bag, you must demonstrate that its position can be arbitrary within the free-range zone (with the exception that you may face the bail in whatever position you deem most favorable).
Delivery zones
Each delivery zone or platform may be no larger than 10 cm in any horizontal dimension. The platforms for the delivery zones will be marked on the ground. You can make them out of cardboard or any other material. To score points, each container must be placed in a delivery zone and left there (upright) long enough to prove that it is stable.
Operation
You will start with your robot on the main road and a bag in the pickup zone. On command (a press of either button on the robot), your robot will drive to the pickup zone, pick up a bag, and deliver it to the specified address, which will be determined by the button press (e.g., ’GP20’ indicates a delivery to address A, etc.). Your robot will then return to the starting point, stop, and wait for the next command.
After each delivery, you will place another bag in the pickup zone and repeat the process, pressing the button to indicate another delivery. You may recycle the bags as much as you wish.
At two random points in the demo, your instructor will place a road construction sign on the main road for 30 seconds, and you will not receive credit for any delivery during which your vehicle hits the sign.
The challenge will last 5 minutes. You may use any of the sensors that you’ve explored in this class to accomplish the challenge. Line following will be an important behavior, but collecting the free-range bags autonomously will require some creativity on your part.
[Video of a sample run coming soon!]
Scoring
[Tune point values over time]
In your run, your team should deliver as much weight as possible, plus and including the “free range” bags. Points will be allocated as follows:
You will receive 5 point for every package you deliver to addresses A or C. However, you may only get 50 points max (corresponding to 10 packages) for each delivery address; i.e., you must deliver to all three addresses to receive the maximum points. You will receive 5 additional points for each free-range bag (20 points max) scored at address B. Your total score will be multiplied by the number of unique addresses you delivered bags to. That is to say, if you scored 1 bag to Address A, and 1 bag to Address B, your final score would be 2 * (5+5) = 20 points. If you scored a free range bag on top of that, your score would be 3 * (5+5+5) = 45 points No points will be received for a delivery where the robot hits the road construction sign. You will lose 2 points for each time you have to touch your robot (e.g., to put it back on the line), other than to specify the delivery zone at the start of each delivery.