Installing the software libraries on your robot
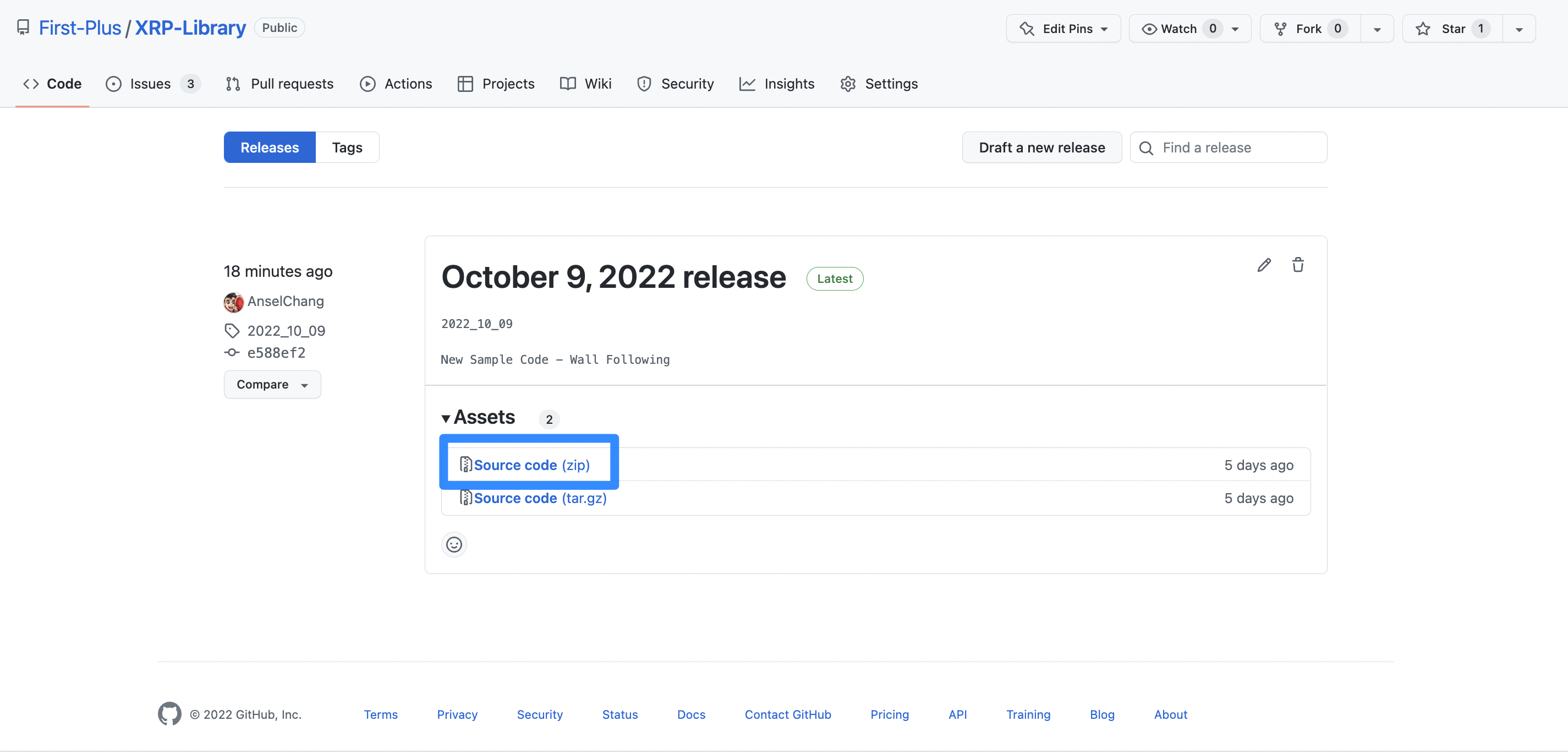
The software library makes it easy to write programs to control the robot and will be used throughout the course. To install it, go to https://github.com/Open-STEM/XRP-Library/releases Links to an external site. and download the “Source code” (zip) file.
Then, unzip the folder. To do this, open Finder on Mac, or File Explorer on Windows. Go to your Downloads folder and find the zip file. On macs, double click the zip file to unzip it, and on windows, right click the zip file, and click “Extract All…”
Note
Be sure that your robot is plugged into a free USB port and turned on.
Next, look for an external drive labelled ‘CIRCUITPY’. If the robot is correctly connected to the computer and turned on, then this folder should be visible in Finder/Windows Explorer.
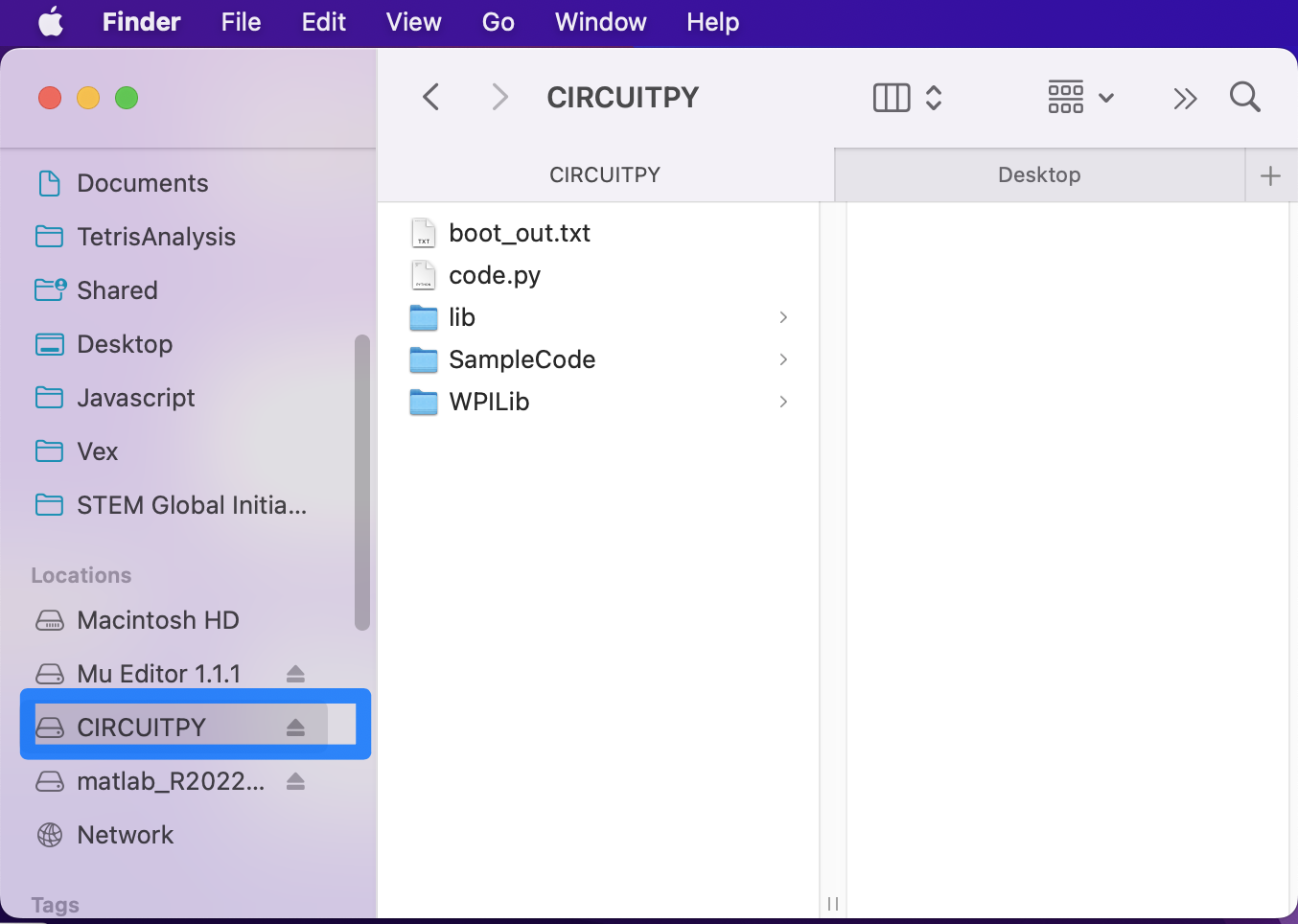
This is where programs can be edited and run. Delete anything that is currently in the drive. Then, go inside the unzipped folder and copy the contents of the folder into the CIRCUITPY drive. The robot should now be set up with the library!
Note
The CIRCUITPY drive should have the code.py file, and the lib, SampleCode, and WPILib folders as shown in the picture above.